À l’occasion de cet exercice, nous allons fabriquer des robots très simples qui peuvent être réalisés rapidement et grâce à des matériaux peu coûteux. Les robots pourront être contrôlés en wifi grâce au smartphone des participants. L’objectif de l’atelier est de comprendre les possibilités offerte par la programmation avec arduino.
Nous nous baserons sur le projet opensource PetitBot, disponible sur le site http://www.wikidebrouillard.org.
Matériel et outils
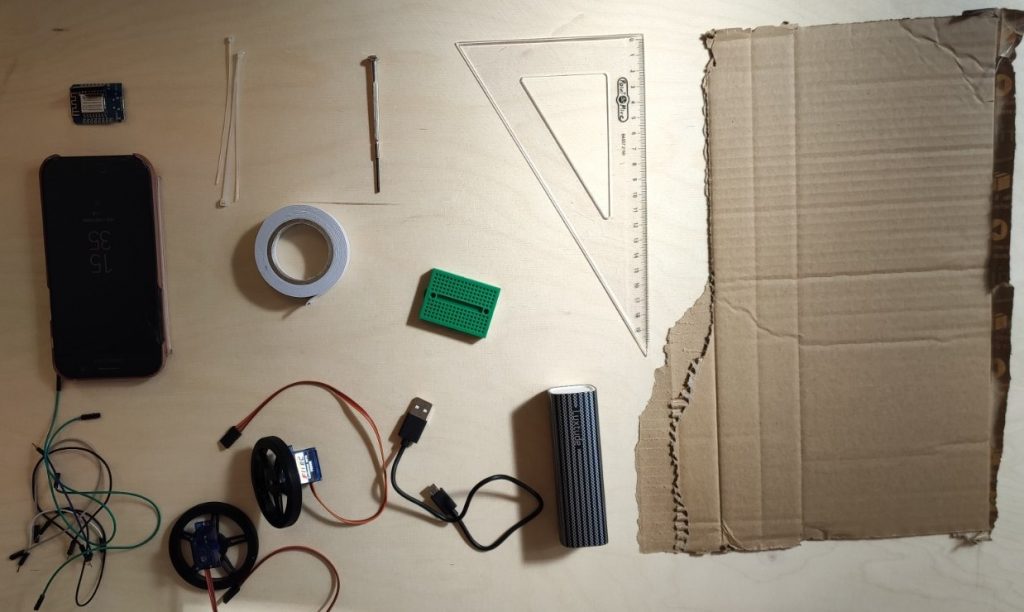
Pour fabriquer le bot, nous utiliserons les matériaux suivants :
- 1 carte électronique programmablede type Wemos D1 mini
- 1 bredboard (platine de prototypage)
- des jumper wire male-male (cables de prototypage)
- 1 batterie USB 5V
- 1 câble micro USB
- 2 servos-moteurs 360° et 2 roues
- du scotch double-face extra-fort
- du carton rigide
- des élastiques ou serflex
Et quelques outils :
- 1 smartphone
- 1 ordinateur équipé du logiciel arduino IDE et de l’extension ESP8266
- 1 paire de ciseaux
- 1 équerre
- 1 mini-tournevis
- 1 stylo
- au moins 1 cerveau et une dizaine de doigts
1. Fabrication du châssis en carton
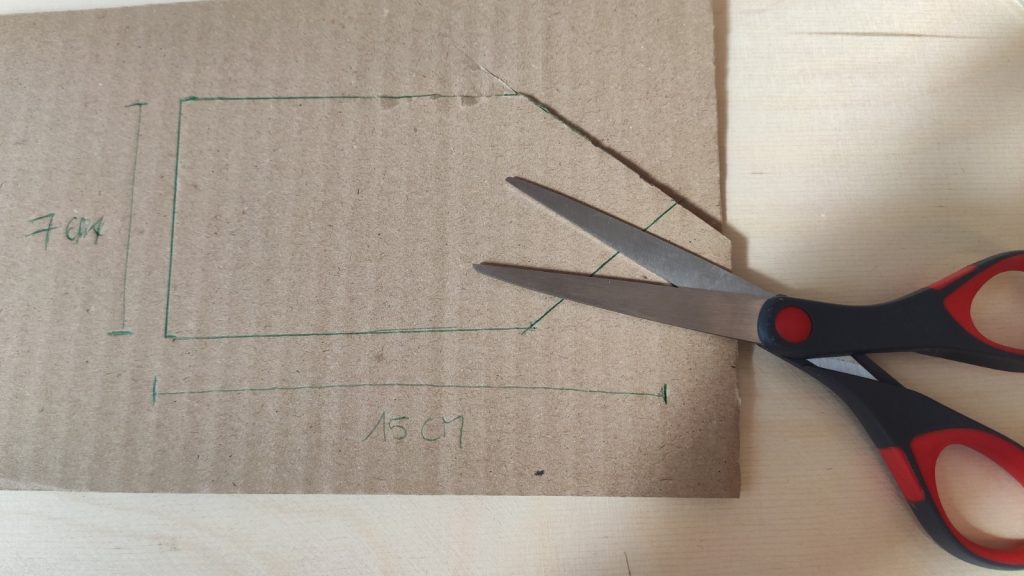
Tout d’abord, traçons une forme de flèche d’environ 15cm par 7cm. La forme peut varier selon les inspirations de chacun… Puis on découpe le châssis, pièce maîtresse qui accueillera ensuite tous les autres composants du bot.
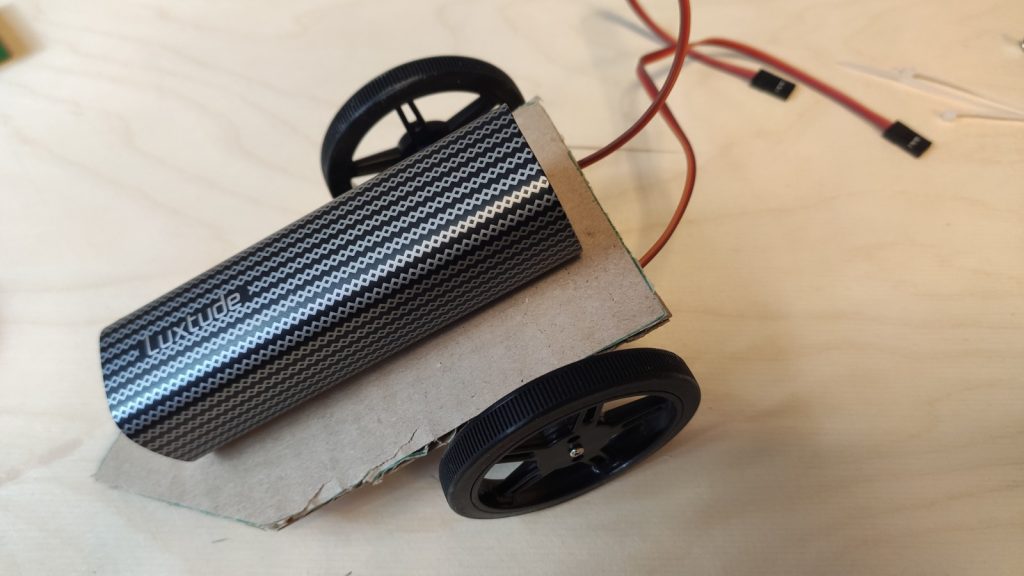
2. Fixation de la batterie sur le châssis
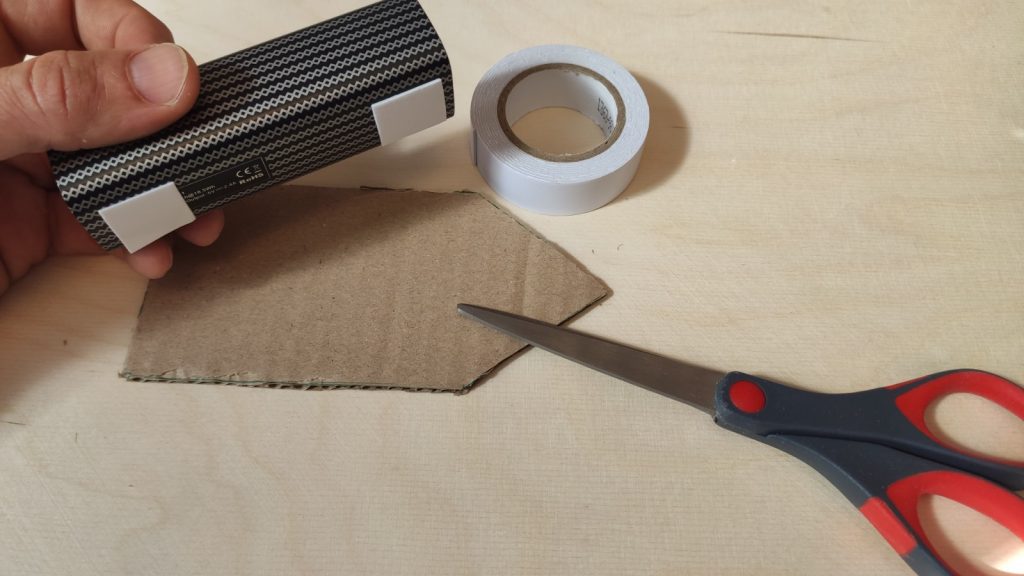
On découpe deux morceaux de scotch afin de fixer la batterie au centre du châssis. On en profite également pour vérifier que la batterie est bien chargée, sinon le robot fonctionne beaucoup moins bien pas.
3. Préparer et installer les servo-moteurs
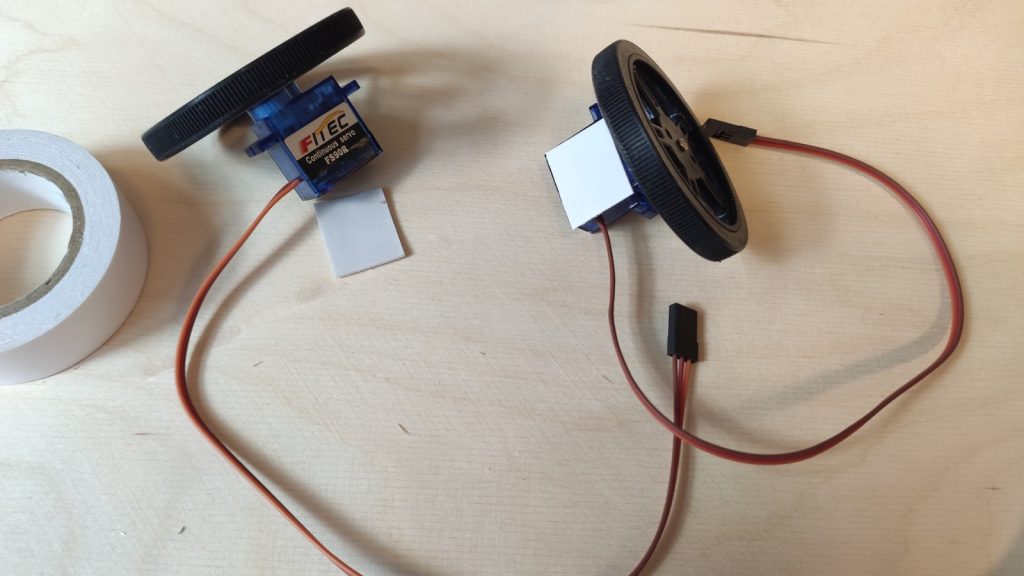
Placer deux morceaux de scotch sur les servo-moteur. Attention, l’un des morceau de scotch doit être placé sur l’autocollant du premier moteur et sur l’autre face pour le second moteur.
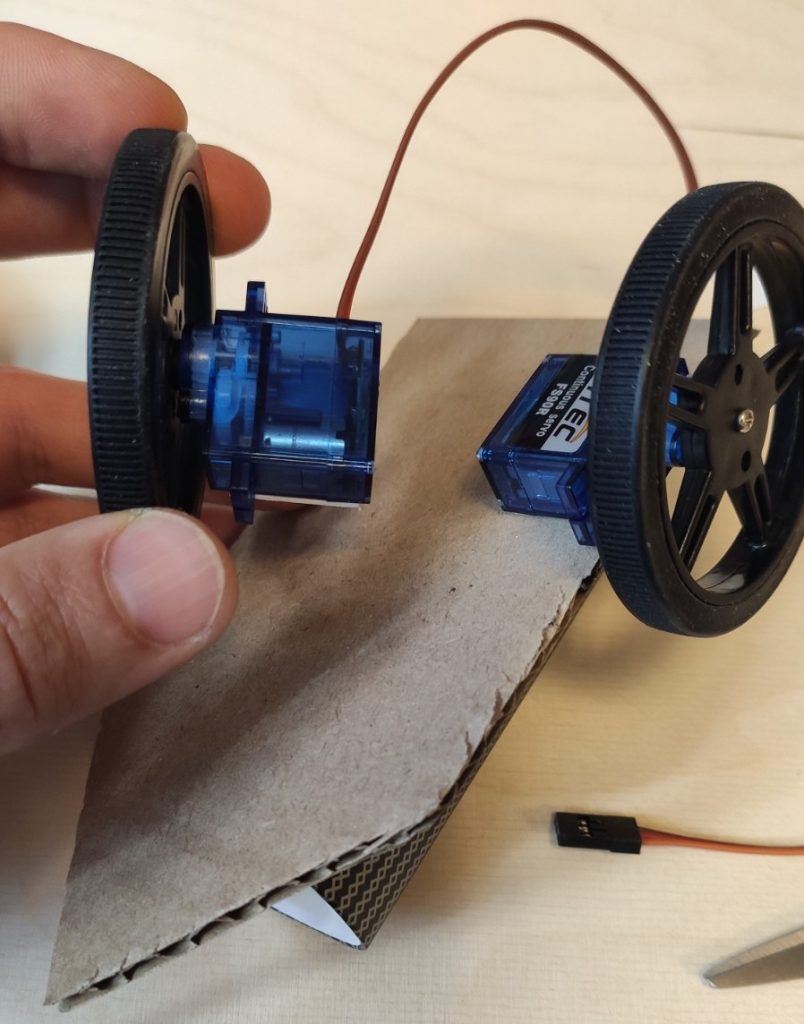
Coller les moteurs sur l’envers du châssis. Attention, les deux cables doivent être orientés du même coté.
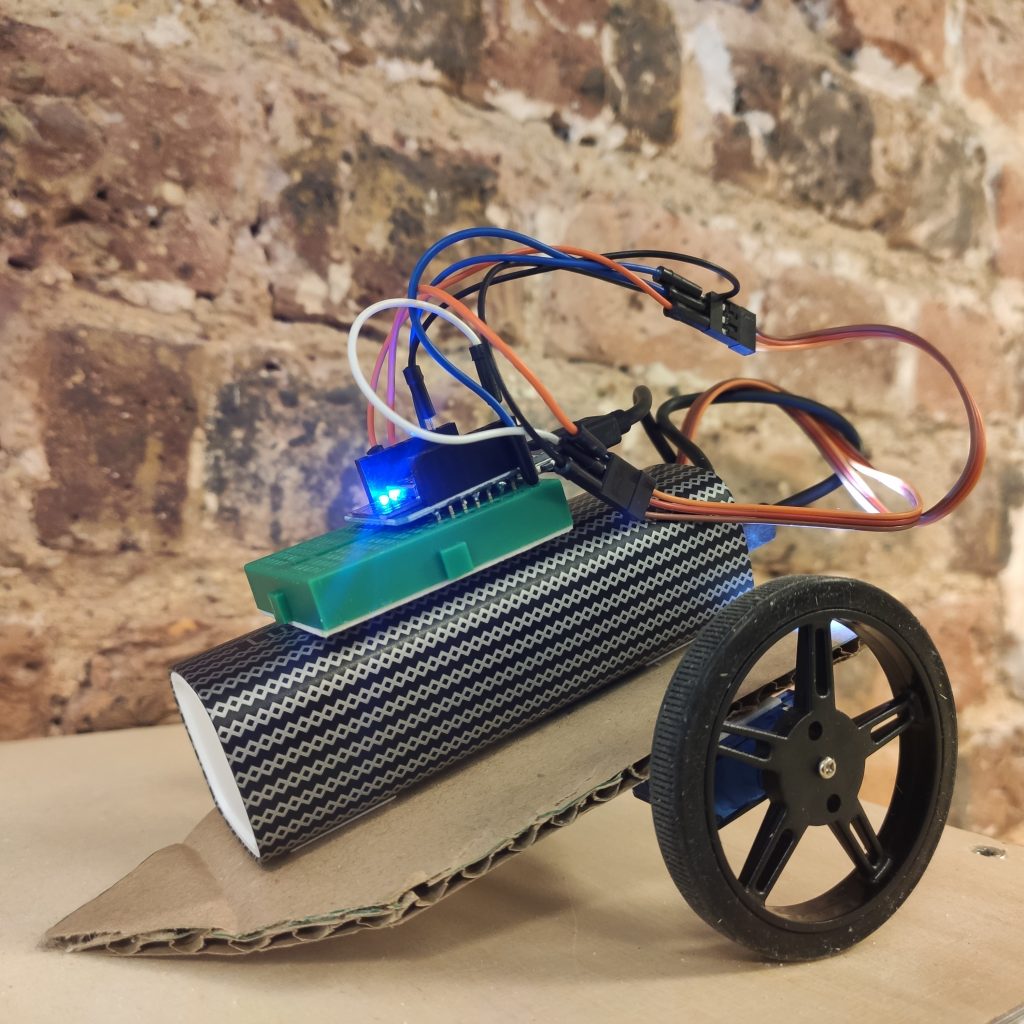
Voilà le résultat ! Si votre bot ne ressemble pas à ça, vous avez sans doute raté quelque chose lors des étapes précédentes :p
4. Installation de la carte programmable
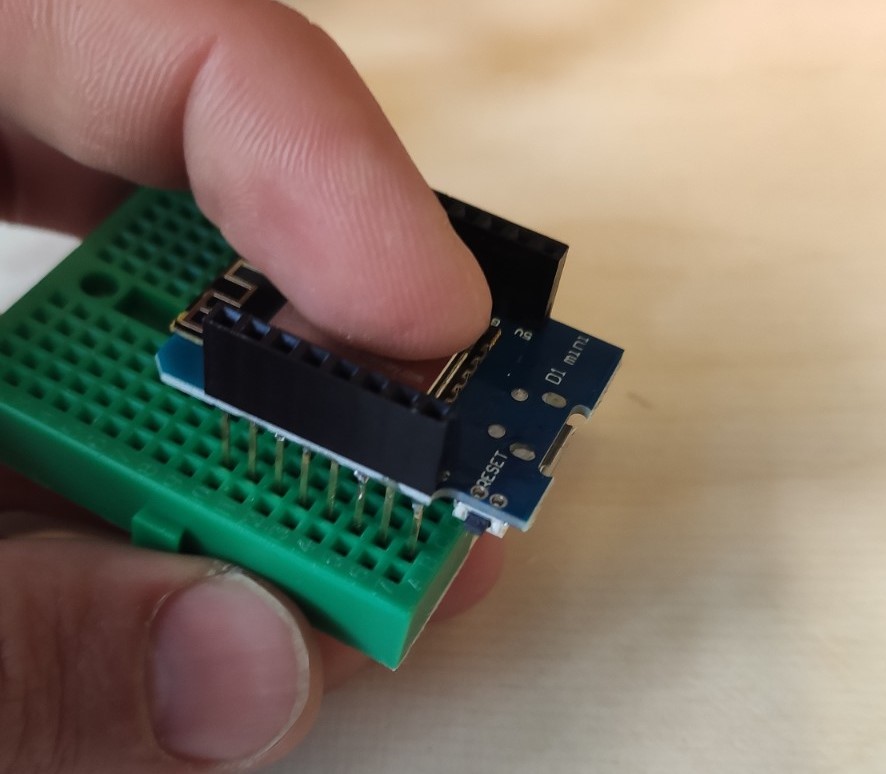
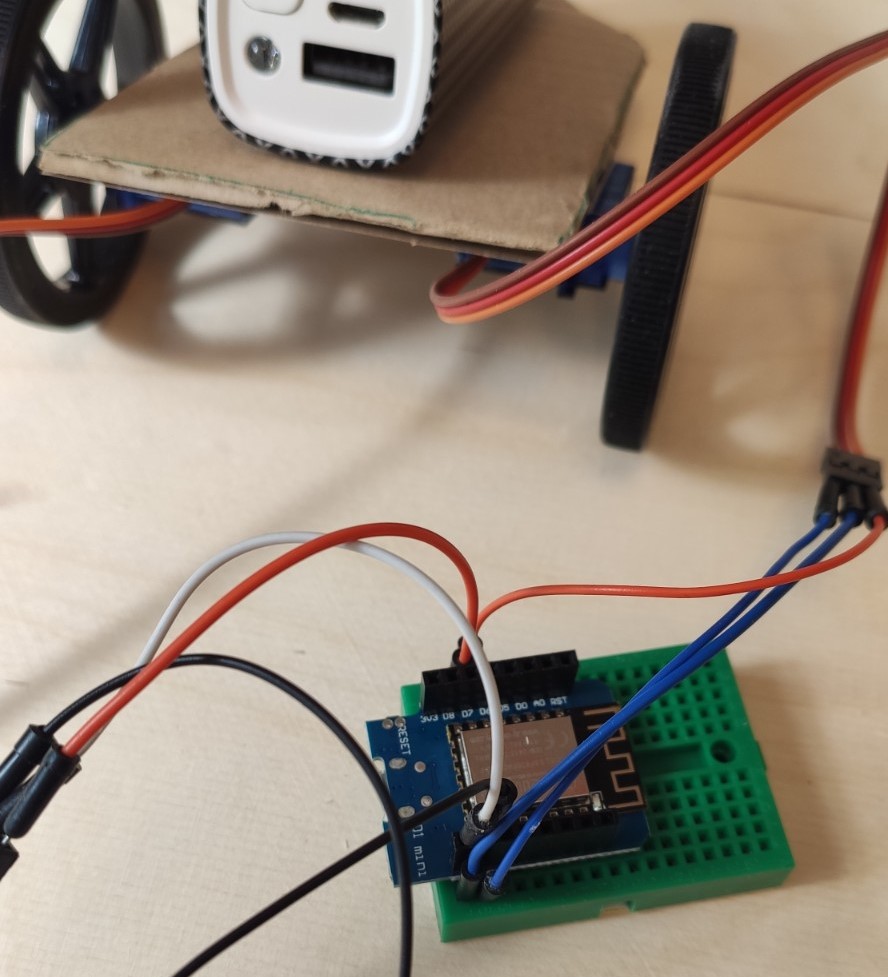
On enfonce donc les broches de la carte dans les trous de la breadboard, pile poil comme le montre la photo. Attention lors de cette opération les broches étant fragiles.
Cette carte programmable est un peu le cerveau de notre robot. Elle doit être placée sur une breadboard (platine de prototypage) afin que l’on puisse y brancher tous nos câbles sans avoir à les souder.
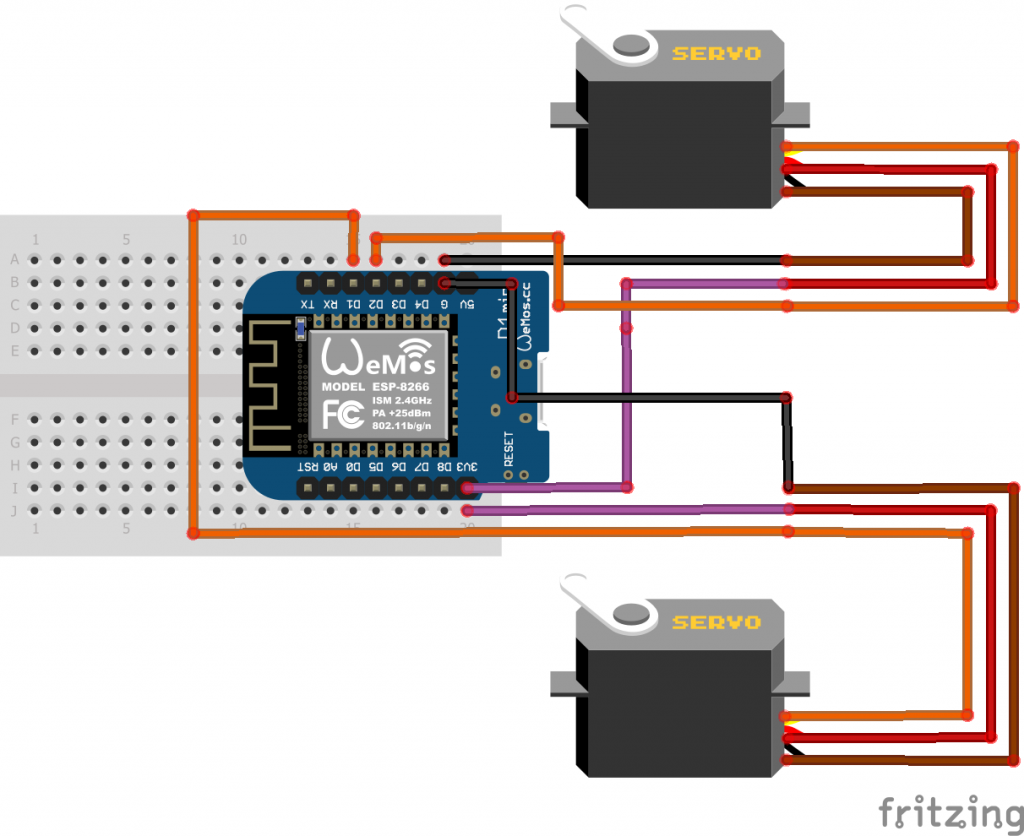
5. Réaliser les branchements
Ca se complique ! Il faut maintenant câbler la carte avec les servomoteurs. Pour cela on utilise des jumper wires : de petits câbles dont le bout rentre parfaitement dans les trous de la breadboard.
Les servomoteurs ont 3 entrées :
- Le câble rouge correspond à l’alimentation +
- Le câble marron correspond à l’alimentation –
- Le câble orange permet de contrôler le moteur
Cliquez ici pour en savoir plus sur les servomoteurs
La carte programmable est équipée de 16 entrées qui permettent de la relier à différent capteurs ou actionneurs. Les capteurs permettent à la carte de recevoir des informations sur le monde extérieur (capteur de luminosité, de son, d’humidité…) et les actionneurs permettent à la carte d’interagir avec son environnement (moteurs, vannes, buzzer…).
Dans notre cas, nous ne branchons que des actionneurs : les servomoteurs. Pour se faire, nous utiliserons les entrées :
- 3,3V pour l’alimentation + des servomoteurs (cable rouge)
- G pour l’alimentation – des servomoteurs (cable marron)
- D1 et D2 pour contrôler les servomoteurs (cable orange)
6. Fixer l’électronique sur le châssis
On peut maintenant coller le montage électronique sur le bot, brancher l’alimentation et organiser les câbles grâce à un élastique ou un serflex.
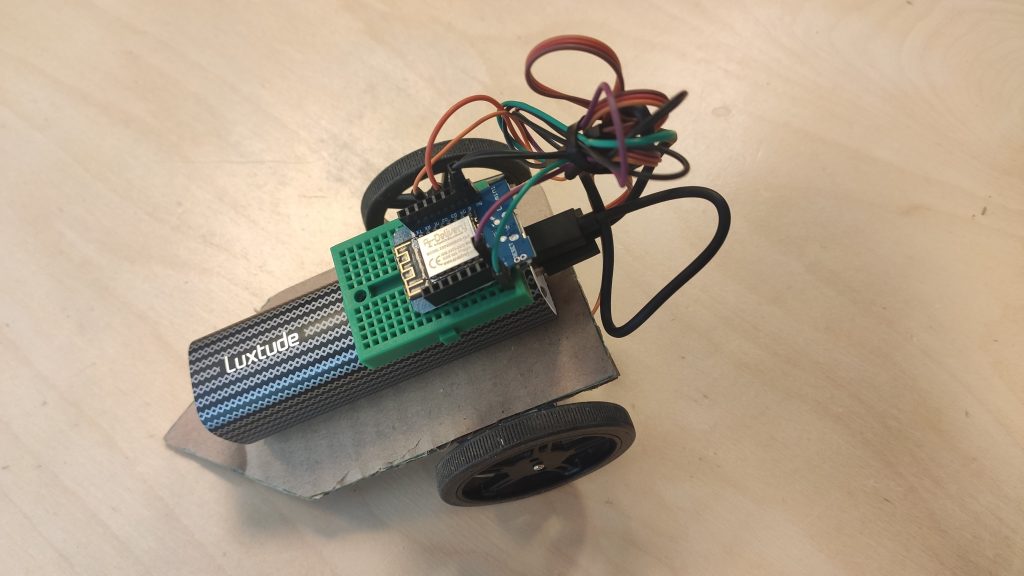
Votre bot est fabriqué, il faut maintenant le programmer ! Cliquez-ici pour la suite.
7. Améliorations possibles
Voici quelques idées pour améliorer le robot :
- fabrication d’une « carrosserie »
- amélioration de la mobilité en créant une ou plusieurs autres roues
- création d’un parcours / piste pour des courses de robots
- …
{kind=link}